-
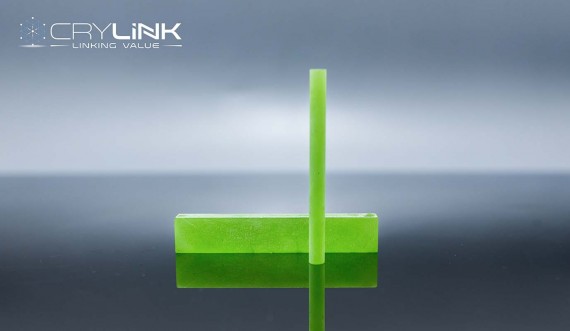
 水晶类型: Yb:KGW 水晶直径: 6mm 水晶长度: 50mm AR 涂层: One side
水晶类型: Yb:KGW 水晶直径: 6mm 水晶长度: 50mm AR 涂层: One sideCr,TM,Ho:YAGIS高效氙灯或二极管泵浦的2.1μm激光晶体。泵浦源主要来源于Cr3+吸收的闪光灯能量,Ho3+是工作离子,Tm3+作为能量传递的媒介。2.1μm激光能很好地被水吸收,容易在大气中传输,对人眼安全。因此被广泛应用于医疗、激光雷达、军事等领域。2.1μm激光器是3-5μm中红外光学参量振荡器的理想泵浦源。
-
 波长: 1064nm 平均值功率: 0.2W 重复频率: 0 - 20 kHz 空间模式: 1 脉宽: 1.5ns
波长: 1064nm 平均值功率: 0.2W 重复频率: 0 - 20 kHz 空间模式: 1 脉宽: 1.5ns发射213 nm、266 nm、355 nm、532 nm和1064 nm波长的高质量被动调Q脉冲激光系统,用于OEM和科学研究。应用包括生物技术、分析、成像、光谱学、传感器系统、微加工和激光雷达。产品组合包括被动调Q、染料和DUV CW激光器。
-
 水晶类型: Other 水晶直径: 3 - 10mm 水晶长度: 3 - 160mm AR 涂层: One side, Both sides, Uncoated
水晶类型: Other 水晶直径: 3 - 10mm 水晶长度: 3 - 160mm AR 涂层: One side, Both sides, Uncoated紫翠玉(Cr3+:BeAl2O4,掺铬铝酸铍)是一种激光增益材料,用于固态激光器,如皮肤病学和激光雷达等。翠绿宝石是通过直拉法生长的。它的抗热震性是Nd:YAG的五倍,发射波长通常在710nm和800nm之间,在许多情况下约为755nm。基于紫翠宝石,有可能制造出波长可调范围很宽的激光器。紫翠宝石是各向异性的,其吸收和增益特性强烈地依赖于泵浦光的偏振方向。这与材料的强双折射一起使得容易获得具有低去偏振损耗的线性偏振发射。
-
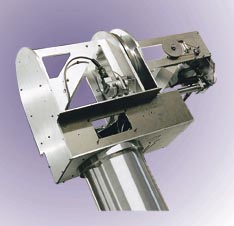 扫描角度: 120deg 扫描频率范围: 1 - 10 Hz 角度分辨率: 60deg 测量范围: 1 - 10 m
扫描角度: 120deg 扫描频率范围: 1 - 10 Hz 角度分辨率: 60deg 测量范围: 1 - 10 mDFM Engineering提供了许多用于光探测和测距(LiDAR)遥感应用的光电机械(EMOS™)扫描仪系统。通常,这些扫描仪是使用两个平面镜的光束定向器的Alt-Az折轴形式。激光雷达扫描仪和光束定向器之间的主要区别是扫描仪具有较低的角分辨率和较高的速度。由于通常使用较长的波长,光学器件可能具有较低的光学特性。扫描仪还可以集成额外的光电机械组件,如准直光学器件、变焦透镜、聚焦运动、光纤馈送等。DFM工程公司已经设计并制造了30多个集成了这些功能的系统,用于测量大气湍流。其中三次是在一艘直升机登陆舰附近,在那里还提供了扫描仪的稳定性,以校正船只的横滚、倾斜和偏航。
-
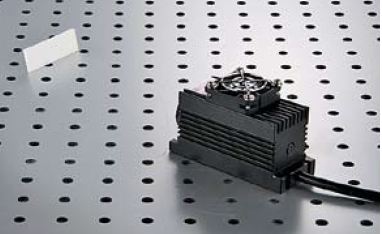 波长: 1064nm 最大输出功率: 100mW 运行模式: CW, Modulated
波长: 1064nm 最大输出功率: 100mW 运行模式: CW, ModulatedEKSMA的红外DPSS激光器。1064nm OEM DPSS红外激光器。OEM DPSS红外激光器的输出功率范围为100~3000mW。OEM DPSS红外激光器可用于:热敏打印,材料检测,扫描生化激光雷达。
-
 水晶类型: Er Glass 水晶直径: 3mm 水晶长度: 30mm AR 涂层: One side
水晶类型: Er Glass 水晶直径: 3mm 水晶长度: 30mm AR 涂层: One side掺Er3+、Yb3+和Cr3+的铒玻璃激光器在1.5μm附近的光谱范围内提供了有用的相干光源,这对人眼是相对安全的,并且在许多应用中是方便的,例如激光雷达和距离测量、光纤通信和激光手术。尽管InGaAs激光二极管泵浦源的研制取得了相当大的进展,但由于Xe闪光灯的高可靠性和低成本,以及这种系统设计的简单性,Xe闪光灯将继续用作铒玻璃激光器的泵浦源。由于约一半的闪光灯辐射能量在可见和近红外(IR)范围内发射,因此将第二敏化剂Cr3+引入到Yb-Er激光玻璃中以利用该能量。
-

大型光束准直器高性能纯高斯光束光纤准直器的设计和制造考虑到了特殊应用,从激光雷达、干涉测量、遥感到光谱学、生物医学和传感器。可以使用各种各样的光纤和数值孔径(NA),包括单模、多模或保偏光纤。工作波长覆盖从350nm到2000nm,甚至按定制顺序延伸到中红外。这些准直器可以与半导体激光器、YAG、DPSS、钛宝石、HeNe和光纤激光器以及许多宽带光源一起工作。Sherlan Optics还生产专业的高功率跳线、高温和模式尺寸转换器,作为与这些准直器配合使用的附件。
-

Maxphotonics 5W、20W保偏放大器具有输出偏振消光比高、稳定功率强的特点。输出偏振消光比为16dB或更高,功率稳定性高,其设计和配置确保了高可靠性,主要用于相干合成、光纤传感、激光雷达和其他科学研究。
-
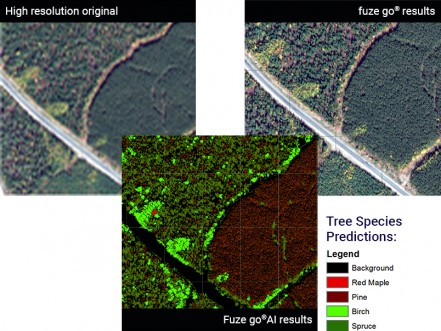
每个物体都有自己独特的“光谱特征”——本质上是它的指纹。使用人工智能驱动的分析,Fuze Go®人工智能可以根据其独特的光谱特征检测物体-提供重要的信息,以较大限度地降低风险,减少损失,并支持盈利能力。Fuze Go®人工智能可以处理来自任何来源的图像,包括卫星,无人机,安全摄像机和激光雷达图像。这些见解改善了林业、公用事业和安全领域的运营——所有这些都比竞争对手的成本更低。
-
 激光波长: 1570nm 扫描角度: 100deg 扫描频率范围: 20 - 30 Hz 测量范围: 1 - 1 m
激光波长: 1570nm 扫描角度: 100deg 扫描频率范围: 20 - 30 Hz 测量范围: 1 - 1 mGoldenEye 3D Flash LiDAR Space Camera™是一款轻巧小巧(14x20.6x16.5cm)的集成3D相机,能够以每秒10帧的速度捕捉每帧128x128独立触发像素的完整阵列,允许每个激光脉冲(帧)实时生成16,300个3D单独范围和强度点作为3D点云图像或视频流。3D数据输出用于提供自主(例如,会合、接近、着陆等)操作或协助人在回路中成像。ASC的3D焦平面阵列已经在空间操作中进行了多次测试和使用,并拥有丰富的成功遗产。所有ASC 3D相机的机载处理允许流式3D点云和强度输出以及相机遥测。“黄金眼”专为深空、地球同步或着陆操作而设计,可进行配置以满足特定任务的应用要求。使用空间操作激光雷达(固体)黄金眼配置的深空操作示例,Osiris-Rex小行星样本返回任务相机的设计使用了空间合格加固组件中的“S”级组件。Osiris-Rex GoldenEye通过使用可切换的光学漫射器来适应长距离和短距离成像。该固态相机能够承受100krad的辐射,重量仅为6.5kg,并可根据眼睛安全要求配置为1064nm或1570nm激光波长。固体黄金眼激光器和焦平面子系统是独立密封的,减少了任何除气污染的机会,并满足美国宇航局的热,真空,振动和冲击要求。
-
 激光波长: 905nm 扫描角度: 25deg 扫描频率范围: 1 - 10 Hz 测量范围: 1 - 40 m
激光波长: 905nm 扫描角度: 25deg 扫描频率范围: 1 - 10 Hz 测量范围: 1 - 40 mGuardian小巧轻便,专为短距离应用而设计,即使在高速下也是如此。由于它没有移动部件,这款闪光激光雷达传感器坚固耐用,即使受到强烈的振动。传感器内部的数字信号处理使其能够为较终更简单的系统输出更可靠和详细的数据、障碍物距离和速度结果。例如,Guardian的低功耗使其成为非常适合小型移动机器人应用的传感器。
-
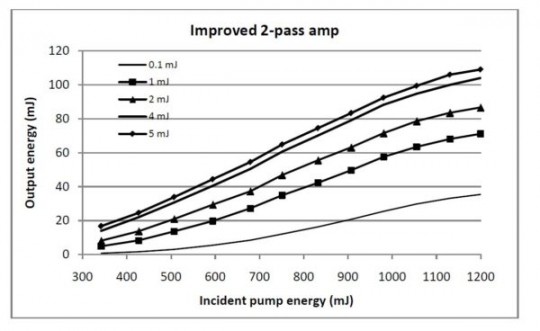 中心波长: 1064nm 重复频率: 10 - 10 kHz 脉冲能源: 1200mJ 脉冲持续时间: 10000fs 极化: Unspecified
中心波长: 1064nm 重复频率: 10 - 10 kHz 脉冲能源: 1200mJ 脉冲持续时间: 10000fs 极化: Unspecified在10ns脉冲内产生5mJ的AQ开关Nd:YAG激光振荡器(1064nm)与高能Nd:YAG VHGM放大器匹配。放大器采用尺寸为8×10×50mm的Nd:YAG板条。用两个15巴激光二极管阵列(总共30巴,无微透镜)在两侧泵浦该实验室。振荡器种子光束两次通过放大器。法拉第隔离器未用于将输入种子光束与双程放大输出光束分离(几何分离)。下图显示了双程放大器对于来自振荡器的0.1、1、2、4和5 MJ的输入种子能量的输入输出效率。在放大器中的较大泵浦能量(1.2J)处,对于5mJ种子能量,双程输出能量为115mJ,对于100-150μJ种子能量,双程输出能量为35mJ。脉率为10Hz。输出光束质量为M2=2至2.5,而种子激光器的光束质量为M2=1.3。我们预计双程放大器的输出光束质量将随着平板制造的改进而改善,未来的努力将提高脉冲速率和平均功率,改善光束质量,并将相同的放大器与短脉冲微片激光振荡器(0.5至1 ns,50至100 PS)相匹配。目标是将整个MOPA激光头封装成6平方英寸或更小的尺寸。这种紧凑的高能MOPA可用于激光诱导击穿光谱(LIBS)、闪光激光雷达、激光辅助表面清洁、精密油漆去除等应用,以及去除纹身等皮肤病学应用。
-
 分类:晶体水晶类型: KTP (KTiOPO4) 宽度: 3mm 高度: 2.8mm 长度: 3.5mm 平整度: <= Lambda/8
分类:晶体水晶类型: KTP (KTiOPO4) 宽度: 3mm 高度: 2.8mm 长度: 3.5mm 平整度: <= Lambda/8KTP:磷酸钛氧钾广泛用于商用和军用激光器,包括实验室和医疗系统、距离探测器、激光雷达、光通信和工业激光系统。KTP较常用于倍频Nd:YAG和其他掺钕激光器,尤其是在低到中等功率的激光器中。到目前为止,利用KTP进行腔内和腔外倍频的掺钕激光器已经逐渐取代了可见光染料激光器和可调谐蓝宝石激光器。在许多工业研究中,这种类型的激光器被广泛用作绿色光源。Crystrong提供-晶体尺寸可达20x20x40 mm-单带和双带AR和BBAR涂层-标准和定制安装件和外壳
-
 峰值量子效率: 23% 光谱范围: 900 - 1700 nm
峰值量子效率: 23% 光谱范围: 900 - 1700 nmID Qube NIR自由运行为电信波长自由运行模式下的单光子探测带来了重大突破。它为异步光子检测必不可少的应用(如光子相关或飞行时间测量)提供了一种经济高效的解决方案。此外,它特别适用于激光雷达等对紧凑性要求很高的应用。探测器提供了一个专用的门输入端口连接器,以避免饱和或不需要的探测。冷却的InGaAs/InP雪崩光电二极管和相关电子设备经过专门设计,可在自由运行模式下实现低暗计数和后脉冲速率。该设备有自由空间或光纤耦合版本(MMF62.5),与SMF和MMF62.5光纤兼容。
-
 峰值量子效率: 20% 光谱范围: 900 - 1700 nm
峰值量子效率: 20% 光谱范围: 900 - 1700 nmID Qube NIR选通是一种针对电信波长优化的快速选通单光子探测器。它为量子通信,特别是量子密钥分配等需要同步光子探测的应用提供了一种经济有效的解决方案。它也非常适合需要紧凑的激光雷达等应用。探测器提供门输入设计,以避免饱和或不需要的检测,也可以在自由运行模式下运行。冷却的InGaAs/InP雪崩光电二极管和相关电子设备经过专门设计,以实现快速门控操作的低暗计数和后脉冲速率。该设备有自由空间或光纤耦合版本(MMF62.5),与SMF和MMF62.5光纤兼容。
-
 气体介质: CO2 激光波长: 10.6um 输出功率: 7W 模式质量: >5 光束直径: 11mm
气体介质: CO2 激光波长: 10.6um 输出功率: 7W 模式质量: >5 光束直径: 11mmOptromix Infralight-SPIS是一种可调谐波长为9.2μm~10.8μm,脉冲宽度为50~100ns的CO2激光器。它在工业材料加工和其他应用中具有出色的性能。InfraLight-SP非常易于使用。它由计算机控制,并为客户提供用户友好的界面。InfraLight-SP可用于许多应用,包括同位素分离、无损检测、激光雷达、表面清洁、标记、电路板打孔和红外光谱。
-
 扫描角度: 360deg 扫描频率范围: 1 - 10 Hz 角度分辨率: 30deg 测量范围: 1 - 300 m
扫描角度: 360deg 扫描频率范围: 1 - 10 Hz 角度分辨率: 30deg 测量范围: 1 - 300 mKaarta Stencil®2-16是一款低成本、灵活的移动地图平台,用于快速移动扫描;一台小到可以拿在手里,但功能强大到可以处理和查看它捕获的任何数据的计算机。Stencil的集成3D映射和实时位置估计实现了固定扫描系统无法实现的功能。Stencil的核心是Kaarta Engine,这是Kaarta正在申请专利的高级3D映射和定位算法。Kaarta Engine的专有方法将其他SLAM系统的漂移误差提高了一个数量级。Stencil可快速轻松地精确绘制外部和大型内部空间,范围可达100米,激光雷达精度为±30毫米。数据速率为每秒300,000点,较高10Hz。Stencil记录GNSS数据,用于环闭合以进行地理注册或地理定位数据集,校正漂移并进一步增强大面积扫描的保真度。Kaarta提供可选的GNSS接收器和支架套件或模板,可与大多数NMEA 0183 GNSS系统集成。Stencil的用户界面和屏幕键盘可在附带的平板电脑上访问,使实时操作变得简单、有条理和直观。使用户能够更好地控制扫描操作。置信度度量通过发信号通知新的扫描数据是否在现有映射中被正确地配准、发信号通知错误的可能性以及允许用户通过调整数据收集技术或调整参数来增加置信度水平,来提供关于扫描匹配的质量的即时反馈。自动地板找平/分割算法可识别地板结构和层次,以获得更好的扫描效果并减少后处理时间。楼层规划器可以从点云中调平、旋转和生成“切片”的二维图像。
-
 水晶类型: KTP (KTiOPO4) 相位测量类型: Not Applicable 安装: Mounted, Unmounted 平整度: <= Lambda/8 表面质量: 10-5
水晶类型: KTP (KTiOPO4) 相位测量类型: Not Applicable 安装: Mounted, Unmounted 平整度: <= Lambda/8 表面质量: 10-5KTP晶体是掺钕激光器较常用的倍频材料。它广泛用于混频以产生红/绿/蓝输出,以及用于OPO和OPA以产生可见光到中红外的可调谐输出。它还用于许多E-O器件,如Q开关和E-O调制器。KTP被广泛应用于商用和军用激光器,包括实验室和医疗系统、测距仪、激光雷达、光通信和工业系统。
-
 水晶类型: KTP (KTiOPO4) 相位测量类型: Not Applicable 安装: Mounted, Unmounted 平整度: <= Lambda/10 表面质量: 20-10
水晶类型: KTP (KTiOPO4) 相位测量类型: Not Applicable 安装: Mounted, Unmounted 平整度: <= Lambda/10 表面质量: 20-10KTP晶体是较常用于倍频(SHG)的掺钕(Nd)激光器,用于绿/红输出。它广泛应用于商用和军用激光器,包括实验室和医疗系统、测距仪、激光雷达、光通信和工业系统。
-

这些高性能纯高斯光束光纤准直器的设计和制造考虑到了特殊应用,从激光雷达、干涉测量、遥感到光谱学、生物医学和传感器。可使用各种光纤和数值孔径(NA),包括单模、多模或保偏光纤。工作波长覆盖从350nm到2000nm,甚至按定制顺序延伸到中红外。这些准直器可与半导体激光器、YAG、DPSS、钛宝石、HeNe和光纤激光器以及许多宽带光源配合使用。其他选项包括高功率(高达20W)、高温(高达600ºC)、非磁性、抗辐射材料和光纤、真空兼容、定制外壳:殷钢、钛、玻璃、陶瓷、集成波片/偏振器准直器或低温准直器。我们还生产专业的高功率跳线、高温和模式尺寸转换器,作为与这些准直器配合使用的附件。
产品选型就用光电查
个人中心
退出登录