-
 服务类型: Concept development, Project management, Engineering design
服务类型: Concept development, Project management, Engineering design我们专有的光刻工艺使用各种液体和干光刻胶薄膜,在尺寸从非常小到非常大的基板上以极高的分辨率定义图案。我们的添加光刻工艺通过将带正电的金属溅射到带负电的基底上来创建电路线,然后,如果需要,进行电镀以构建具有精确高度和宽度的导电迹线。您可以获得更一致的迹线定义、更薄且因此更灵活的电路(在需要的地方)以及更均匀的电路线(即,顶部和底部宽度相同)。
-
 传感器类型: CMOS # 像素(宽度): 1312 # 像素(高度): 1082 像素大小: 8um 峰值量子效率: 50%
传感器类型: CMOS # 像素(宽度): 1312 # 像素(高度): 1082 像素大小: 8um 峰值量子效率: 50%板级相机系列BL1-D1312(IE)-CL源自MV1-D1312(IE)-CL相机系列,并且在功能集中100%兼容。不同之处在于相机外壳的机械结构。相机系列BL1-D1312(IE)-CL基于PhotonFocus A1312和A1312IE CMOS图像传感器。这些PhotonFocus CMOS传感器具有90 ke的全阱容量(FWC),针对高动态范围应用和高信噪比(SNR)进行了优化。摄像机具有CameraLink基本接口。这些相机专注于工业图像处理中要求苛刻的应用。由于采用了LINLOG®技术,它们提供了非常宽的动态范围,并将高帧率与高分辨率相结合。由于采用了全局快门,即使是曝光时间在微秒范围内的高速应用也是可能的。
-
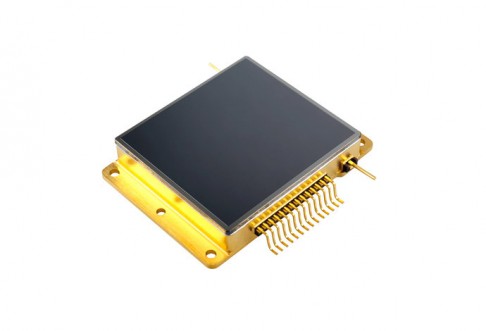
 传感器类型: CMOS # 像素(宽度): 2048 # 像素(高度): 1088 像素大小: 5.5um 峰值量子效率: 80%
传感器类型: CMOS # 像素(宽度): 2048 # 像素(高度): 1088 像素大小: 5.5um 峰值量子效率: 80%MV1-D2048x1088-HS03-G2相机采用基于CMOSIS CMV2000 CMOS图像传感器的IMEC Snapshot Mosaic CMV2K-SM4x4-470-630-VIS传感器。该传感器在470nm到630nm的光谱范围内具有16个4×4马赛克的通带,半峰全宽(FWHM)为15nm。传感器的空间分辨率为每个光谱带512 X 256个像素。这些相机专注于要求苛刻的高光谱成像应用。传感器的低全阱容量和全局快门使高速应用成为可能。摄像机具有GigE接口(GigeVision)。
-
 传感器类型: CMOS # 像素(宽度): 2048 # 像素(高度): 1088 像素大小: 5.5um 峰值量子效率: 80%
传感器类型: CMOS # 像素(宽度): 2048 # 像素(高度): 1088 像素大小: 5.5um 峰值量子效率: 80%MV1-D2048x1088-HS04-G2相机采用基于CMOSIS CMV2000 CMOS图像传感器的IMEC Snapshot Mosaic CMV2K-SM2x2 RGB+NIR传感器。该传感器在2×2马赛克中具有4个通带。窄带NIR成像滤波器与包括NIR截止滤波器的标准RGB有机滤色器组合。传感器的空间分辨率为每个光谱带1024×544像素。这些相机专注于要求苛刻的多光谱成像应用。传感器的低全阱容量和全局快门使高速应用成为可能。摄像机具有GigE接口(GigeVision)。
-

光子多普勒测速仪:用于更可靠的高速现象测量Idil Fibers Optiques开发了先进个用于冲击和Detonic应用的工业光子多普勒测速仪。这项技术允许测量先进的或多种速度,在0到20公里/秒的范围内,具有极好的时间分辨率。基于傅里叶变换算法的专用软件可实现速度场的快速可视化。紧凑的模块化系统高度为5U,允许用户构建1至4个测量通道的PDV系统。这个新系统集成了一些改进,例如:低速测量选项与固定的移动频率,红色校准激光直接集成在每个输出,所有参数可在触摸屏上调整…紧凑型光子多普勒测速仪:多达4个测量通道https://www.idil-fibres-optiques.com/product/pdv/光子多普勒测速仪:多达32个测量通道https://www.idil-fibres-optiques.com/product/photonic-doppler-velocimeter-1-to-32-channels/
-
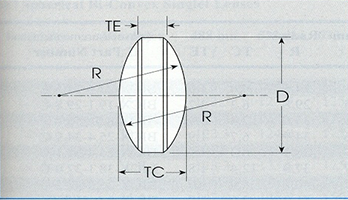
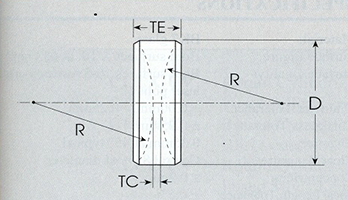 材料: BK7, MgF2, Ge, Si, ZnSe, CaF2, FS 直径: 25.4mm 镜头类型: Bi-Concave
材料: BK7, MgF2, Ge, Si, ZnSe, CaF2, FS 直径: 25.4mm 镜头类型: Bi-ConcavePhotonics Solutions Group提供各种定制光学产品和服务。我们为客户的所有光学需求提供真正集成的一站式来源。从开始到结束,PSG拥有独特的能力,为我们的客户提供各种光学材料的定制光学器件。PSG能够处理较关键的项目,并按照您的确切标准提供这些项目。
-
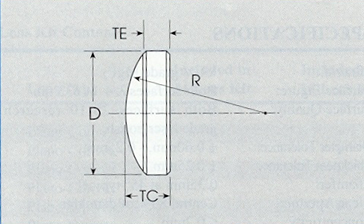
 材料: BK7, MgF2, Ge, Si, ZnSe, CaF2, FS 直径: 25.4mm 镜头类型: Bi-Convex
材料: BK7, MgF2, Ge, Si, ZnSe, CaF2, FS 直径: 25.4mm 镜头类型: Bi-ConvexPhotonics Solutions Group提供各种定制光学产品和服务。我们为客户的所有光学需求提供真正集成的一站式来源。从开始到结束,PSG拥有独特的能力,为我们的客户提供各种光学材料的定制光学器件。PSG能够处理较关键的项目,并按照您的确切标准提供这些项目。
-
 材料: BK7, FS, CaF2, ZnSe, Si, Ge, MgF2 直径: 50.8mm 镜头类型: Plano-Convex
材料: BK7, FS, CaF2, ZnSe, Si, Ge, MgF2 直径: 50.8mm 镜头类型: Plano-ConvexPhotonics Solutions Group提供各种定制光学产品和服务。我们为客户的所有光学需求提供真正集成的一站式来源。从开始到结束,PSG拥有独特的能力,为我们的客户提供各种光学材料的定制光学器件。PSG能够处理较关键的项目,并按照您的确切标准提供这些项目。
-
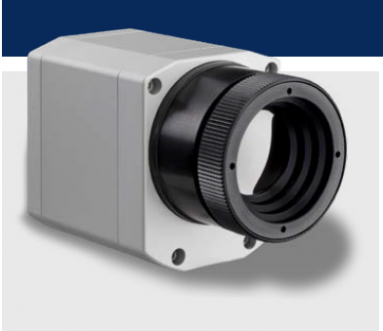 相机类型: Industrial, Scientific, Security 阵列类型: Microbolometer 光谱带: 7.9 - 7.9 um # 像素(高度): 382 # 像素(宽度): 288
相机类型: Industrial, Scientific, Security 阵列类型: Microbolometer 光谱带: 7.9 - 7.9 um # 像素(高度): 382 # 像素(宽度): 288玻璃行业的热成像解决方案。
-
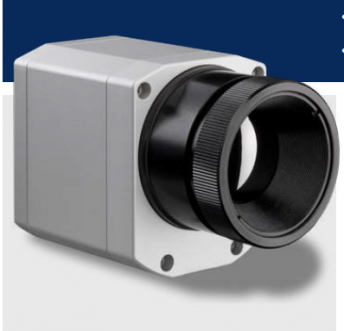 相机类型: Industrial 阵列类型: Microbolometer 光谱带: 7.9 - 7.9 um # 像素(高度): 640 # 像素(宽度): 480
相机类型: Industrial 阵列类型: Microbolometer 光谱带: 7.9 - 7.9 um # 像素(高度): 640 # 像素(宽度): 480用于玻璃行业的高分辨率热成像解决方案。
-
 相机类型: Industrial, Scientific, Security 阵列类型: Microbolometer 光谱带: 7.5 - 13 um # 像素(高度): 640 # 像素(宽度): 480
相机类型: Industrial, Scientific, Security 阵列类型: Microbolometer 光谱带: 7.5 - 13 um # 像素(高度): 640 # 像素(宽度): 480VGA分辨率的热成像。
-
 运动距离: 5um
运动距离: 5um工作电压0至1000V。使用寿命长,无降额。大位移,低电容。亚纳米分辨率,µs响应。集成温度传感器,防止过热损坏。极高的可靠性:>109次循环。
-
 运动距离: 5um
运动距离: 5um工作电压0至1000V。使用寿命长,无降额。高比排量。高级部队。亚纳米分辨率,µs响应。工作温度范围-20至85°C。
-
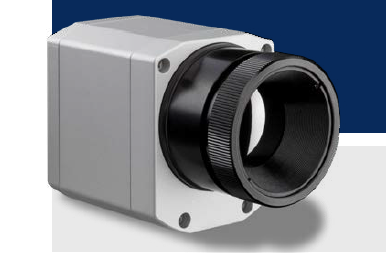
 相机类型: Industrial, Security, Military 阵列类型: Not Specified 光谱带: 8 - 14 um # 像素(高度): 1024 # 像素(宽度): 768
相机类型: Industrial, Security, Military 阵列类型: Not Specified 光谱带: 8 - 14 um # 像素(高度): 1024 # 像素(宽度): 768Pico1024Gen2在长波红外光谱范围内工作,专为较苛刻的环境而设计,可为远程探测应用提供高分辨率和高对比度成像。Pico1024Gen2非常适合用于机载车辆的扩展范围监控摄像机以及科学级摄像机的制造商。
-
 模式锁定电源: 10000mW 脉冲持续时间: 10000fs 重复频率: 100 - 100 MHz 脉冲能量: 100nJ 中心波长: 1064 - 1064 nm
模式锁定电源: 10000mW 脉冲持续时间: 10000fs 重复频率: 100 - 100 MHz 脉冲能量: 100nJ 中心波长: 1064 - 1064 nm激光技术的新领域:较强大的二极管泵浦锁模激光器。
-
 中心波长: 532nm 重复频率: 100000 - 100000 kHz 脉冲能源: 0.05mJ 能量稳定性: 1% 脉冲持续时间: 10000fs
中心波长: 532nm 重复频率: 100000 - 100000 kHz 脉冲能源: 0.05mJ 能量稳定性: 1% 脉冲持续时间: 10000fs激光技术的新领域:较强大的二极管泵浦锁模激光器。
-
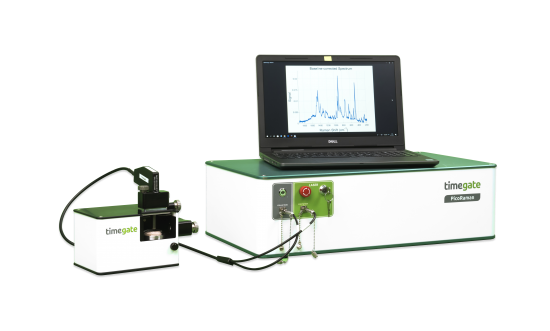 激发波长: 0.1nm 范围: -550 - -2500 cm^-1 决议: 5cm^-1
激发波长: 0.1nm 范围: -550 - -2500 cm^-1 决议: 5cm^-1荧光发射被视为拉曼光谱中的主要挑战。获得专利的TimeGated®技术解决了这个问题。PicoRaman具有亚纳秒脉冲激发和时间分辨单光子计数探测器,能够实现有效和真实的荧光抑制,使定量分析和定性分析更加准确和可靠。由于荧光不再是限制,光谱分析变得更加具体和精确。
-
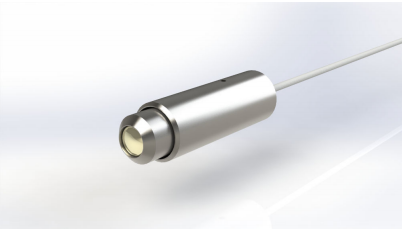
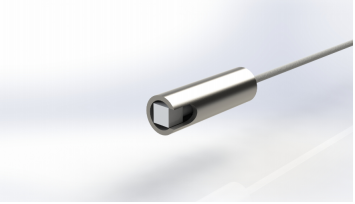 干涉仪配置: Not Specified 光源: 1550nm 输出极化: Linear 有效值重复性: Not Specified 有效值精度: Not Specified
干涉仪配置: Not Specified 光源: 1550nm 输出极化: Linear 有效值重复性: Not Specified 有效值精度: Not SpecifiedC01是皮级干涉仪的标准传感头类型。由于其准直输出光束、紧凑的外形和各种定制选项,它适用于较常见的应用。每个传感器头(见图1)基于两个主要组件:准直光纤输出光束的透镜系统和将光束分为参考光束和探测光束的分束器。参考光束被内部参考镜反射,该内部参考镜被涂覆到分束器立方体的一侧。探测光束从头部射出并被目标表面反射,以跟踪其相对位移。分束器的前表面标记每个皮级测量的绝对零位置,因为在这里探针和参考光束具有相等的长度。
-
 干涉仪配置: Not Specified 光源: 1550nm 输出极化: Linear 有效值重复性: Not Specified 有效值精度: Not Specified
干涉仪配置: Not Specified 光源: 1550nm 输出极化: Linear 有效值重复性: Not Specified 有效值精度: Not SpecifiedC03是一种传感头类型,针对中等工作距离进行了优化,并使用回复反射器作为目标。探测光束被放大,使得其发散度减小,并且在目标反射镜处反射之后可以收集更多的光功率。C03传感头类型基于标准C01型传感头,包括光纤准直光学器件和分束器。分束器将光束分成参考光束和探测光束。参考光束被涂在分束器立方体一侧的内部参考镜反射。在C03传感器头中,探测光束在被望远镜(两个透镜)扩展后离开传感器头,以显著降低光束发散度。它被目标表面反射并跟踪其相对位移。分束器的前表面标记每个皮级测量的绝对零位置,因为这里探测光束和参考光束具有相等的长度。
-
 干涉仪配置: Not Specified 光源: 1550nm 输出极化: Linear 有效值重复性: Not Specified 有效值精度: Not Specified
干涉仪配置: Not Specified 光源: 1550nm 输出极化: Linear 有效值重复性: Not Specified 有效值精度: Not SpecifiedF01是具有聚焦探测光束的传感头类型。这允许测量小目标的位移。此外,传感器头提供高角度公差。如图1所示,在预准直之后,集成分束器将光分成参考光束和探测光束。参考光束被参考反射镜反射,该参考反射镜被涂覆到分束器立方体的一侧。探测光束由透镜系统聚焦并从头部射出。分束器的前表面标记每个皮级测量的绝对零位置,因为这里探测光束和参考光束具有相等的长度。因此,工作距离(WD)不等于距头部的距离(即焦距f),因为透镜系统仅集成到探测光束中。
产品选型就用光电查
个人中心
退出登录