使用深度学习进行相位恢复
发布时间:2024-01-04 01:00:07 阅读数: 215
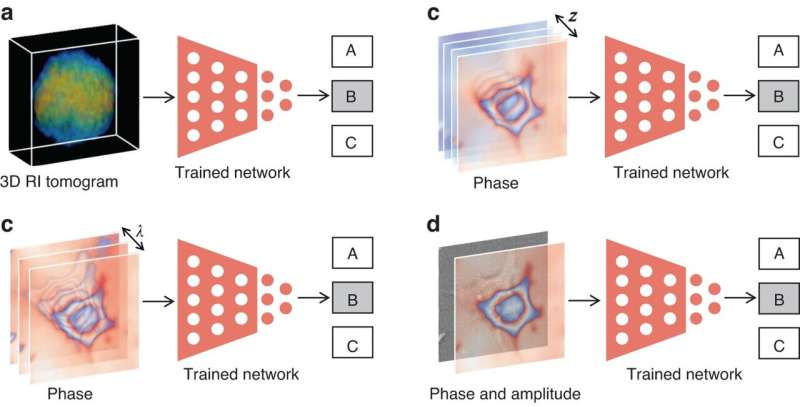
基于深度学习的高维相位数据分类描述。来源:《Light:Science & Applications》(2024 年)。DOI: 10.1038/s41377-023-01340-x
光作为一种电磁场,有两个基本组成部分:振幅和相位。然而,通常依靠光子-电子转换的光学探测器(如电荷耦合器件传感器和人眼)由于采样频率有限,无法捕捉光场的相位。
幸运的是,随着光场的传播,相位延迟也会导致振幅分布发生变化;因此,我们可以记录传播光场的振幅,然后计算相应的相位,这就是所谓的相位恢复。
一些常见的相位恢复方法包括全息/干涉测量法、夏克-哈特曼波前传感法、强度方程传输法和基于优化的方法(相位检索)。这些方法在时空分辨率、计算复杂性和应用范围等方面都有各自的不足。
近年来,作为迈向真正人工智能(AI)的重要一步,通常通过深度神经网络实现的深度学习在相位恢复方面取得了前所未有的性能。
在《Light:Science & Applications》上发表的一篇综述论文中,来自香港大学、西北工业大学、香港中文大学、广东工业大学和麻省理工学院的科学家们从以下四个方面对各种深度学习相位恢复方法进行了评述:
深度学习-相位恢复预处理:神经网络在相位恢复前对强度测量进行一些预处理,如像素超分辨率、降噪、全息图生成和自动对焦等。
用于相位恢复的深度学习中处理:神经网络直接执行相位恢复,或通过监督或非监督学习模式与物理模型或基于物理的算法一起参与相位恢复过程。
用于相位恢复的深度学习后处理:神经网络在相位恢复后执行后处理,如降噪、分辨率增强、像差校正和相位解包。
深度学习相位处理:神经网络将恢复的相位用于特定应用,如分割、分类和成像模式转换。
为了让读者了解更多有关相位恢复的知识,他们还介绍了一个实时更新资源(https://github.com/kqwang/phase-recovery)。
当深度学习应用于各种相位恢复过程时,它不仅带来了前所未有的效果,也带来了一些不可预知的风险。有些方法看似相同,却存在难以察觉的差异。这些科学家指出了一些类似方法之间的区别和联系,并就如何充分利用深度学习和物理模型进行相位恢复提出了建议:
"需要注意的是,uPD(未经训练的物理驱动)方案无需大量强度图像作为前提,但每次推理都需要多次迭代;而tPD(经过训练的物理驱动)方案只需通过一次训练好的神经网络即可完成推理,但需要大量强度图像进行预训练。"
"zf是一个固定向量,这意味着神经网络的输入与样本无关,因此不能像PD方法那样对神经网络进行预训练,"他们在介绍结构先导网络-物理策略时说。
"基于学习的深度神经网络具有巨大的潜力和效率,而基于物理的传统方法则更加可靠。因此,我们鼓励将物理模型与深度神经网络结合起来,特别是对于那些从现实世界中建模的模型,而不是让深度神经网络作为一个'黑盒子'执行所有任务,"科学家们说。