基于光学计算超表面的全光目标识别与三维重建
发布时间:2023-12-22 04:00:08 阅读数: 176
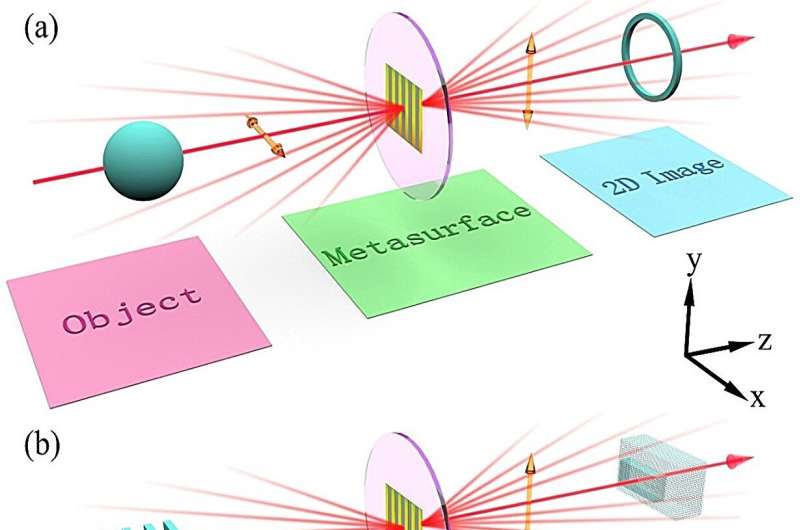
图1所示。目标识别与全光学三维重建系统方案说明。(a)系统单次处理即可获得目标的轮廓表面图像。(b)该全光计算超表面系统可以重建高对比度物体和低对比度物体。来源:光电进展(2023)。DOI: 10.29026/oea.2023.230120
随着目标识别和三维(3D)重建技术在各种逆向工程、人工智能、医疗诊断和工业生产领域变得至关重要,人们越来越关注寻求效率更高、速度更快、更集成的方法来简化处理。
在当前的目标识别和三维重建领域中,提取样本轮廓信息主要是通过各种计算机算法来完成的。传统的计算机处理器受到多种限制,如高功耗、低速度运行和复杂的算法。在这方面,最近人们越来越关注寻找替代光学方法来执行这些技术。光学计算理论和图像处理技术的发展为物体识别和三维重建技术提供了更完备的理论基础。近年来,光学方法以其超快的运算速度、高集成度和低延迟的巨大优势,作为一种替代传统机制的模式受到越来越多的关注。
超表面作为亚波长尺度的二维纳米结构,在光学领域的革命性发展中表现出了显著的能力,它可以有效地简化和深度集成光学系统的足迹。
在实际应用中,超表面已经显示出有效地操纵光的几个参数的能力。因此,超表面在光学模拟计算、光学密码学、光学器件设计、信号处理、显微镜成像、光学成像和纳米绘画等许多潜在领域都有应用。
光学计算超表面作为一种二维人工设计元件,具有控制光束相位、振幅、偏振和频率分布的超常规特性,能够对输入光场进行数学运算。
近日,中国湖南大学物理与电子学院罗海璐教授课题组提出了一种基于光学计算元表面的全光学物体识别与三维重建技术。与传统机制不同,该方案减少了轮廓曲面提取过程中的内存消耗。高对比度和低对比度实验结果的识别和重建与真实物体吻合较好。全光学目标识别和三维重建技术的探索为高效、低消耗、紧凑的系统提供了潜在的应用。
这篇发表在《光电进展》杂志上的文章的作者提出了一种基于光学计算超表面的全光学物体识别和三维重建技术。通过设计和制作光学计算超表面,实现了高对比度和低对比度物体的全光学识别和三维重建。
与以往基于超表面的三维成像研究不同,该方法依靠光学模拟计算获得物体的轮廓信息,可以实现高对比度和低对比度物体的识别和三维重建,为基于超表面的光学模拟计算提供了独特的应用。目标识别系统的原理如图1(a)所示。
当观测到的物体加入到系统中时,系统可以通过全光学方法输出物体的轮廓信息。该系统的目标识别能力也可扩展到全光学三维重建技术。通过对观测对象的不同投影图像进行重组,可以得到观测对象的三维模型,无论是高对比度对象还是低对比度对象[图1(b)]。
从理论上讲,高对比度物体的三维轮廓面可以看作是无限个二维轮廓的叠加。因此,对于高对比度的物体,提出了旋转法和切片法进行三维重建。对于低对比度的物体,可以通过打破正交偏振态技术获得三维重建模型。
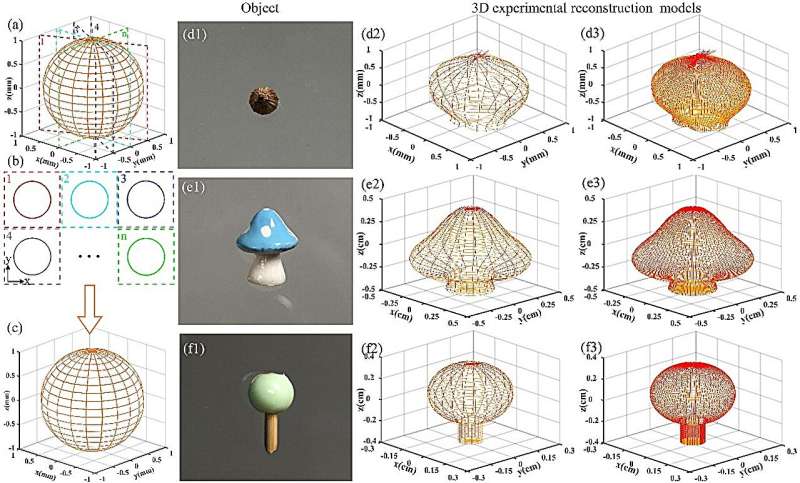
图2全光学三维高对比度物体重建系统的实验演示。(a)全光学高对比度物体三维重建示意图。不同的颜色平面代表不同的投影平面。(b)图(a)中观测对象在不同投影平面上的轮廓信息结果。(c)将图(b)中捕获的不同投影结果重新组合后重建的三维模型。(d1)-(d3)以芫荽籽为原点图像,分别获得旋转间隔角为16°和4°的三维实验重建模型。(e1)-(f3)与图同类型蘑菇模型和棒棒糖模型的三维实验重建模型。(d1)——(d3)。来源:光电进展(2023)。DOI: 10.29026/oea.2023.230120
为了验证上述方案三维重建的可行性,以图2(a)中的一个球体为例。通过在光学系统中以等间隔旋转物体,CCD相机可以捕获物体在不同投影平面上的多个轮廓结果,如图2(b)所示。最后,通过对整个轮廓信息进行重新排列组合,即可重建高对比度目标的三维实验重建模型[图2(c)]。
在图3(d) -3 (e)中,我们使用香菜籽、蘑菇模型和棒棒糖模型来演示这一重建过程。从理论上讲,间距角越小,重建模型越精确。作为概念验证,仅用有限的轮廓来说明该方案用于三维重建的可行性,实验结果表明该技术是方便和准确的。
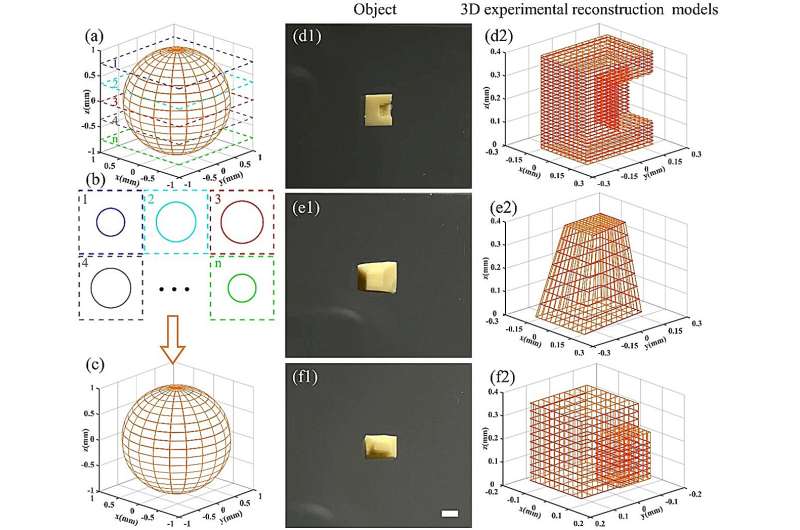
图3复杂表面高对比度物体三维重建实验方案(a)三维重建方案依赖于将目标物体离散成小间隙的二维切片。(b)捕获被观察物体的每一片所包含的轮廓信息。(c)将图(b)中捕获的不同投影结果重新组合,重建三维模型。(d)-(f)分别为沟槽、平台和凸台的原始模型和三维实验重建模型。来源:光电进展(2023)。DOI: 10.29026/oea.2023.230120
在不失一般性的前提下,研究小组将重点放在具有复杂轮廓表面的高对比度物体上。对于一些具有复杂表面的高对比度物体,旋转物体的三维重建方法已不再适用。因此,本课题组提出了另一种基于物体切片的三维重建方法。以图3(a)中的球体为例,以微小的间隔对物体进行切片,CCD相机可以捕获物体在不同投影平面上的多个轮廓结果,如图3(b)所示。
最后,通过对整个轮廓信息进行重新排列组合,即可重建高对比度目标的三维实验重建模型[图3(c)]。理论上,切片过程的精度越高,重建的三维模型就越准确。作为概念验证,图3(d1) -3 (f1)中使用了一些具有不同特征的简单几何形状,如凹槽、着陆和凸台来验证该实验。
通过对这三个物体进行切片,获得它们在不同平面上的轮廓信息,并将这些轮廓信息重新排列组合,最终得到图3(d2) -3 (f2)所示的它们的三维实验重建模型。无论是内部带缺口的凹槽,外部凸起的凸台,还是斜面着陆,三维实验重建模型的形状和大小都与原物体吻合良好。该方法对于具有复杂表面或内部结构的物体的三维重建具有潜在的应用前景。
通过探索基于光学计算超表面的全光模拟计算系统的应用,提出并实现了一种高对比度和低对比度物体的光学目标识别和三维重建技术。本工作有望应用于种子筛选、表面形貌检测、定量显微三维重建等领域,为图像处理和工业检测提供独特的研究方向。